这两天S7-200SmartV2.4的固件升级,集成PN接口,和V90,G120通讯。特别是通过SINA_POS模式能控制8个V90PN,另外加本体3路脉冲做PTO,总共可以带11个伺服。俨然一下次成为了简易运动控制的新宠。看的我这个老菜鸟也心痒痒,加上之前也没用过趁这波热潮也来学习一下吧。
----------------------总结写开头,大神来指教------------------------------
200 Smart的运动控制功能和1200(PTO)还是很有些不同,比如有零脉冲ZP信号,反向补偿,通过485读取驱动器位置。但是没有软限位,回零碰到硬限位开关自动反向功能,曲线表也不如工艺对象“命令表”(Command table)来的灵活。不过毕竟便宜特别配合samrt line触摸屏价格很有优势,所以在小型单机设备里面还是很受欢迎。
--------------------------------------------------
S7-200 SMART CPU 提供了三种开环运动控制方法
● 脉冲串输出 (PTO):内置在 CPU的速度和位置控制。
(注意:无 PTO向导可用。请用运动控制向导代替。)
● 脉宽调制 (PWM):内置在 CPU的速度、位置或负载循环控制。请参见脉冲输出指令。
● 运动轴:内置于 CPU 中,用于速度和位置控制
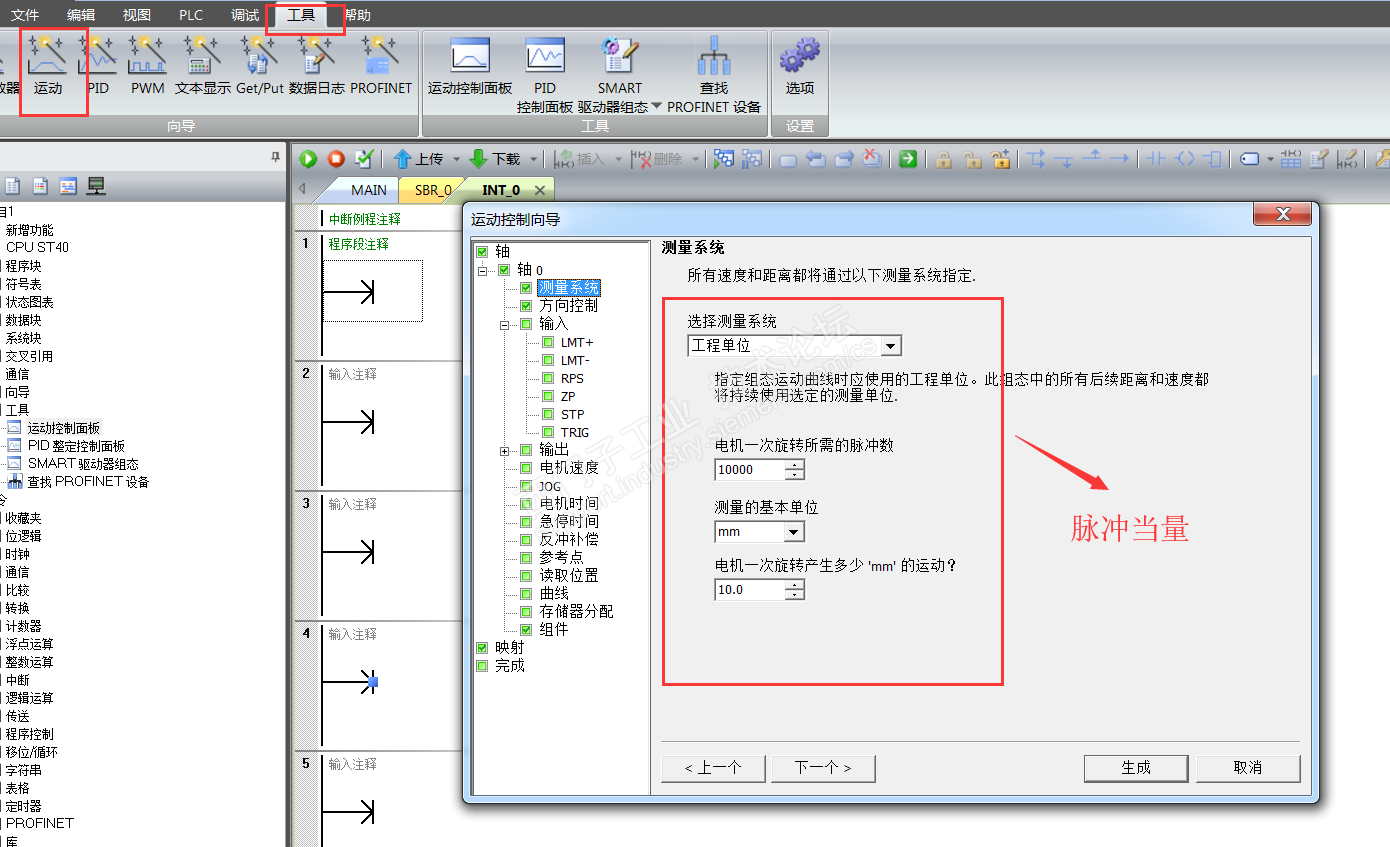
S7-200 SMART只能做开环运动和1200的PTO模式一样。前两种先不看,下面使用运动控制向导来看看第三种运动轴。
测量系统:就是设置脉冲当量。
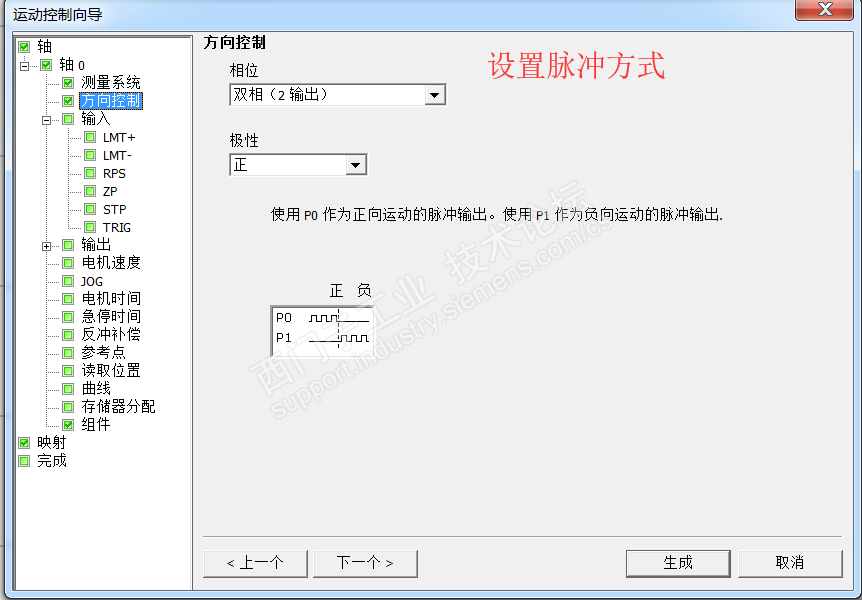
方向控制:选择脉冲类型和极性。脉冲类型有4种,脉冲+方向,正负脉冲,AB相和单脉冲
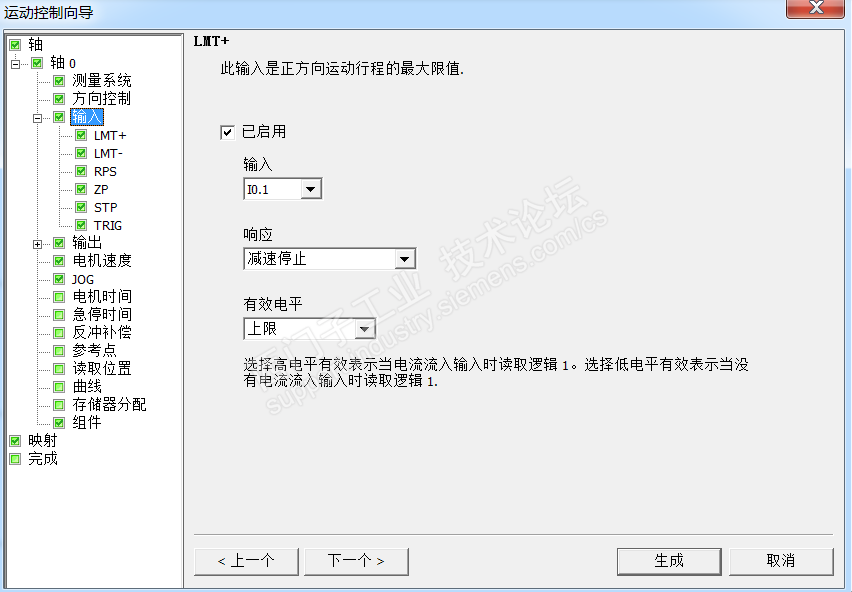
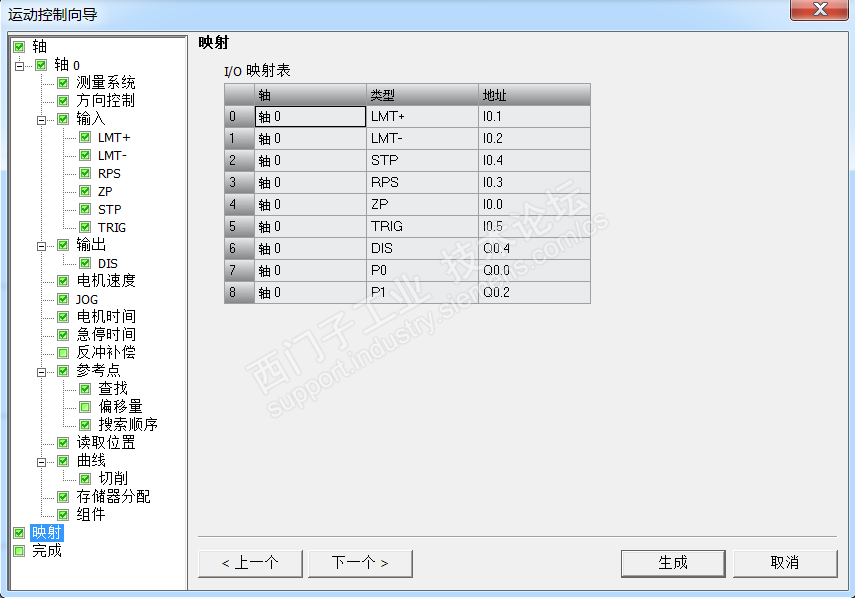
输入:分配输入点功能
LM+,LM-:硬限位开关
RPS:回参考点减速开关,
ZP:零脉冲(伺服电机转一圈编码器有一个零脉冲)需要接入高速口,1200直接把这个功能阉割掉了
STP:停止运动控制,感觉分配给急停用的。这个1200也没有
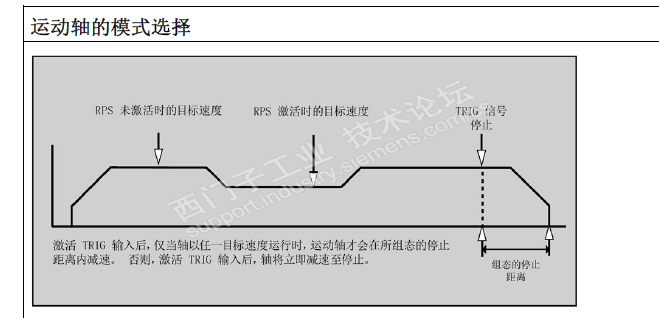
TRIG:用于双速连续旋转的时候触发停止用。这个1200还是没有
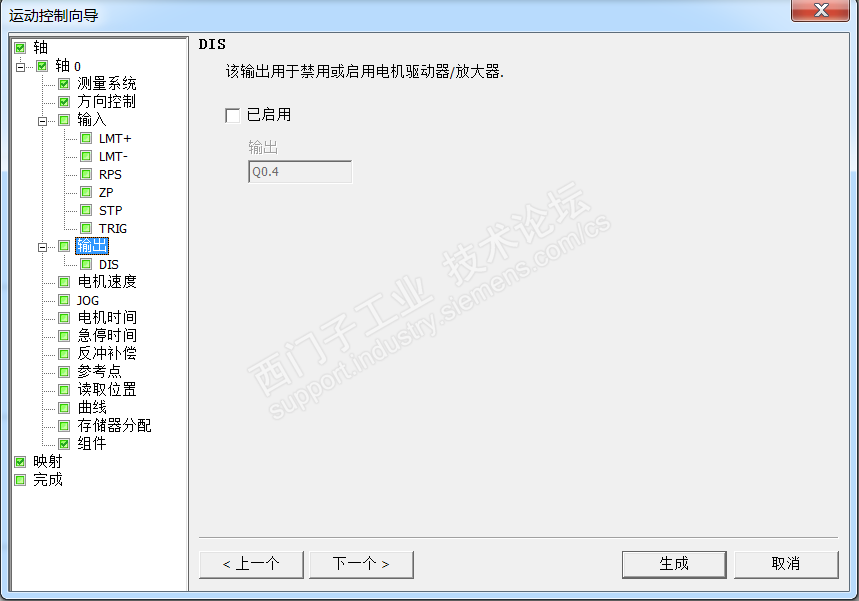
输出:分配输出口
DIS:用于控制伺服使能
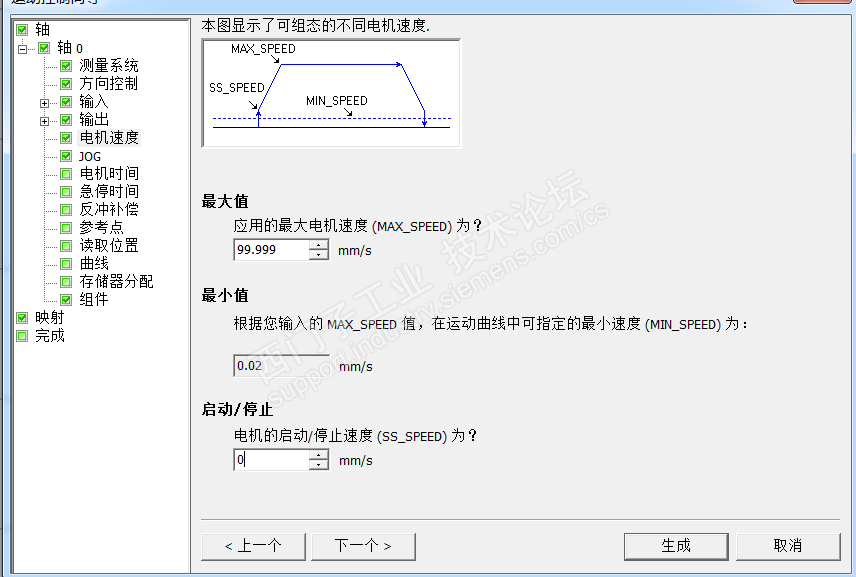
电机速度:设置最大最小和启动速度
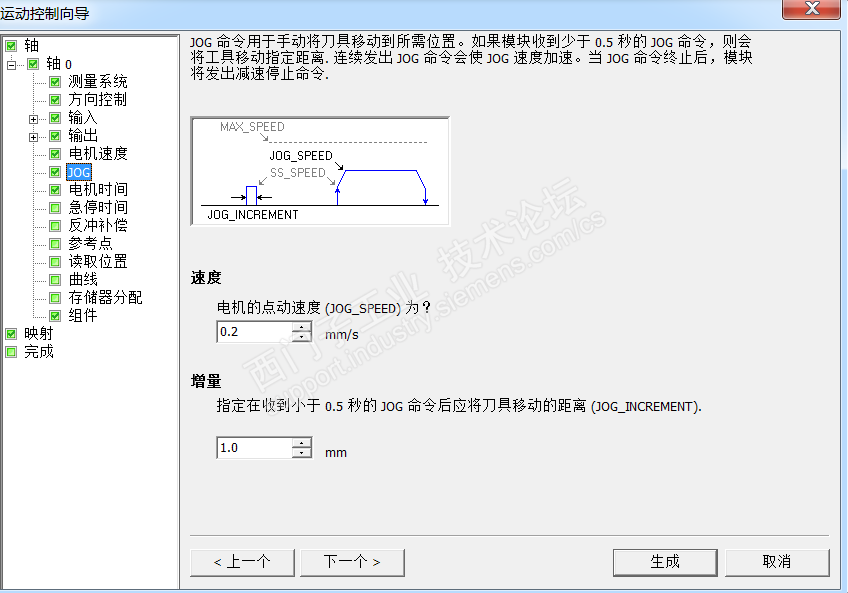
JOG:手动移动时候的速度和点动量
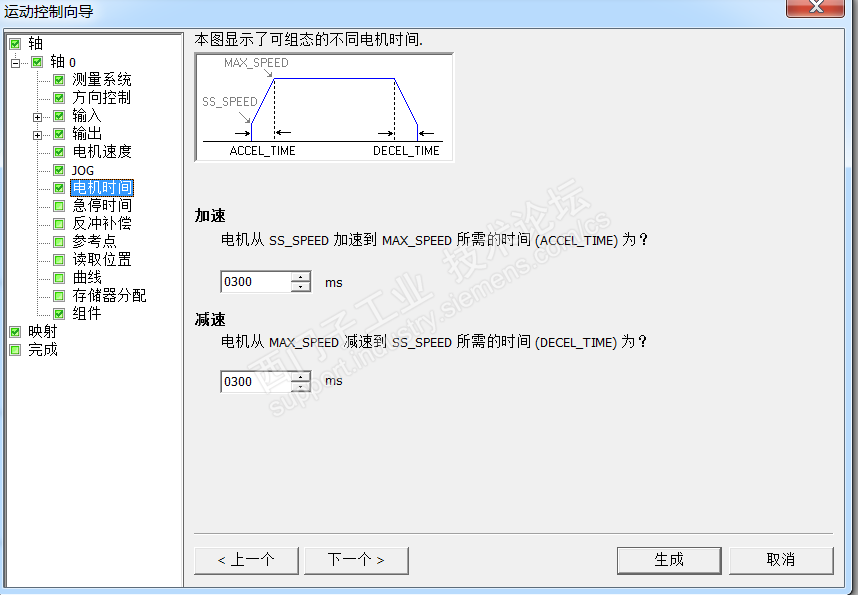
电机时间:加减速时间
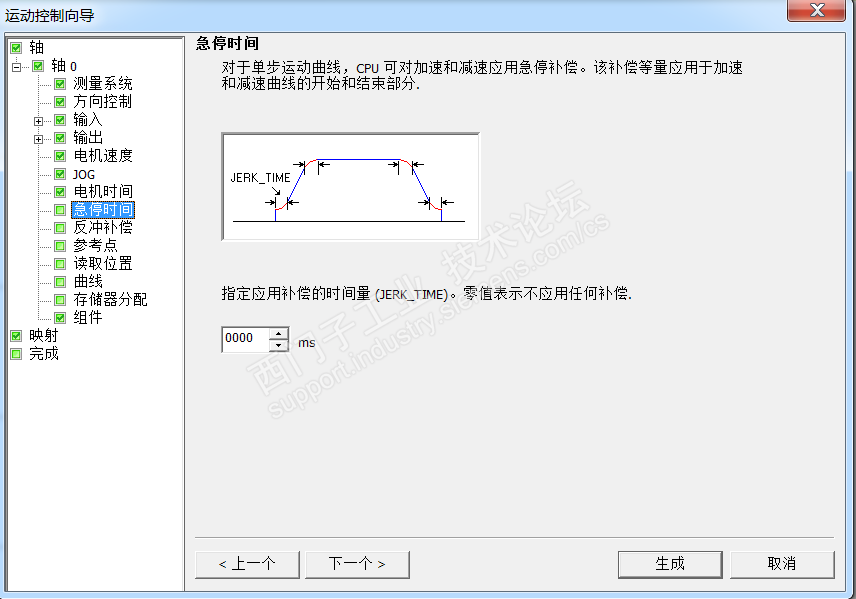
急停时间:急停延时停止的时间
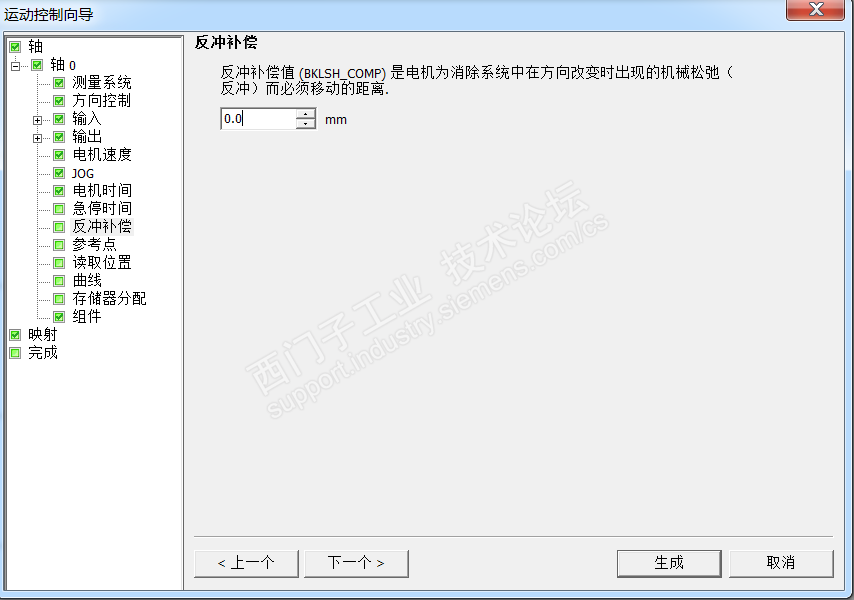
反冲补偿:我们通常叫做反向间隙,丝杠和螺母之间肯定存在一定的间隙,所以在正转后变换成反转的时候,在一定的角度内,尽管丝杠转动,但是丝母还要等间隙消除以后才能带动工作台运动,这个间隙就是反向间隙。通过这个功能可以补偿。
参考点寻参参数:包括查找回零开关信号(RPS)的速度和方向,找到开关后的慢速度找零脉冲的(ZP)的速度和方向

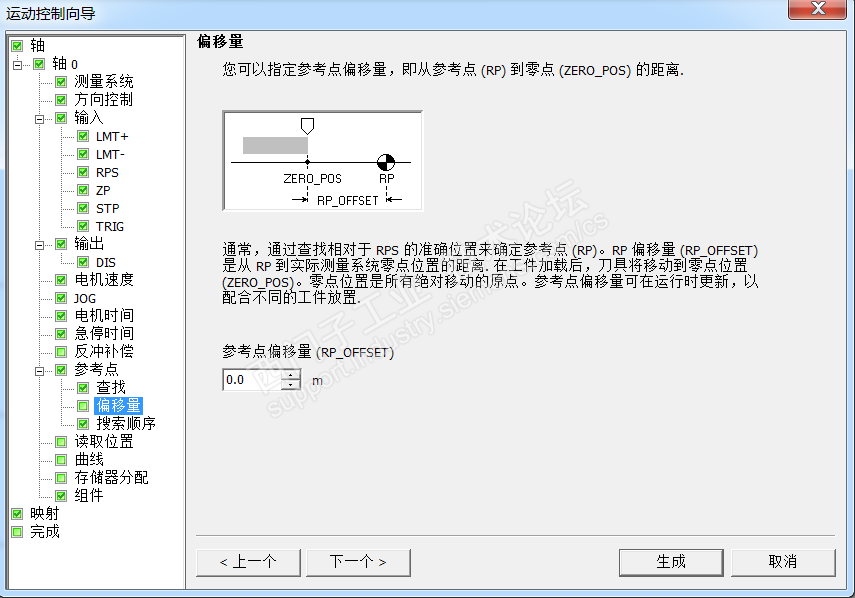
参考点偏移量:设置找到ZP机械零点,偏移到指定位置作为工件零点的位置
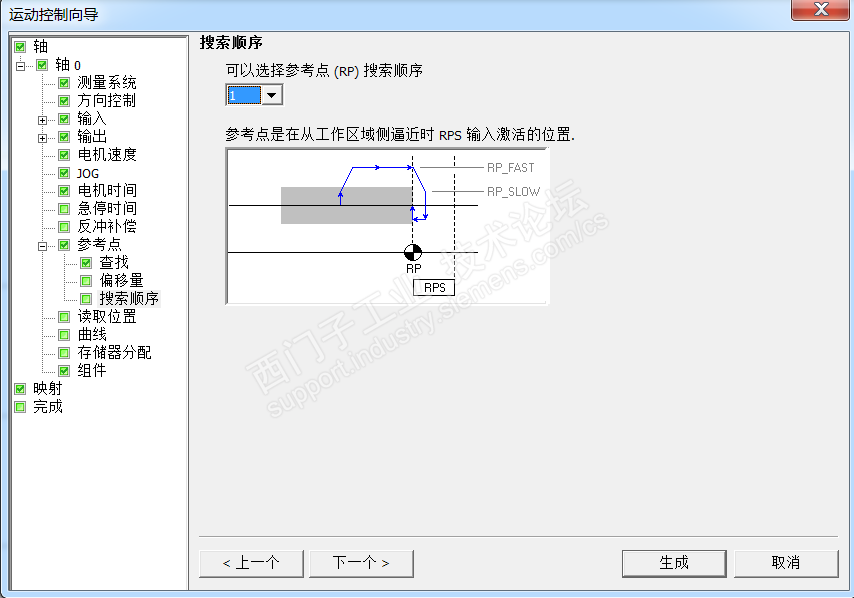
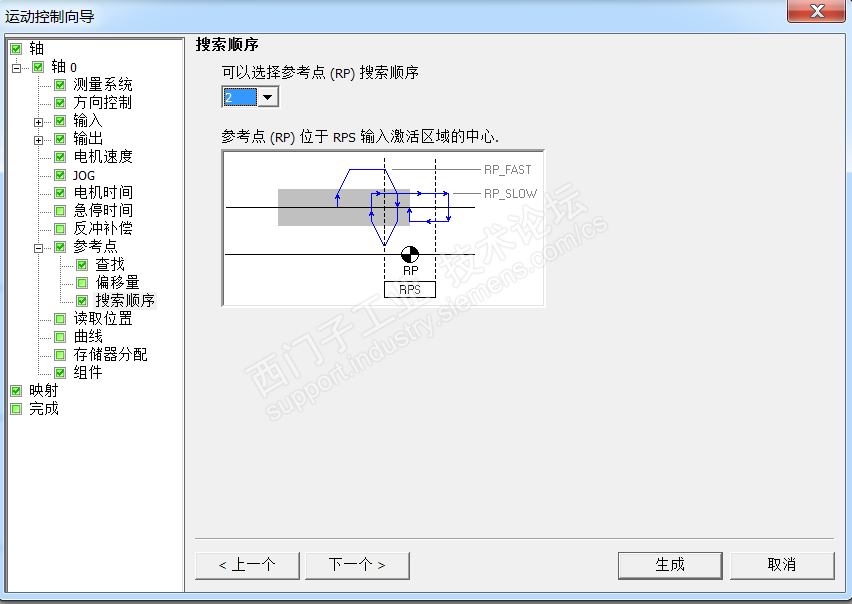
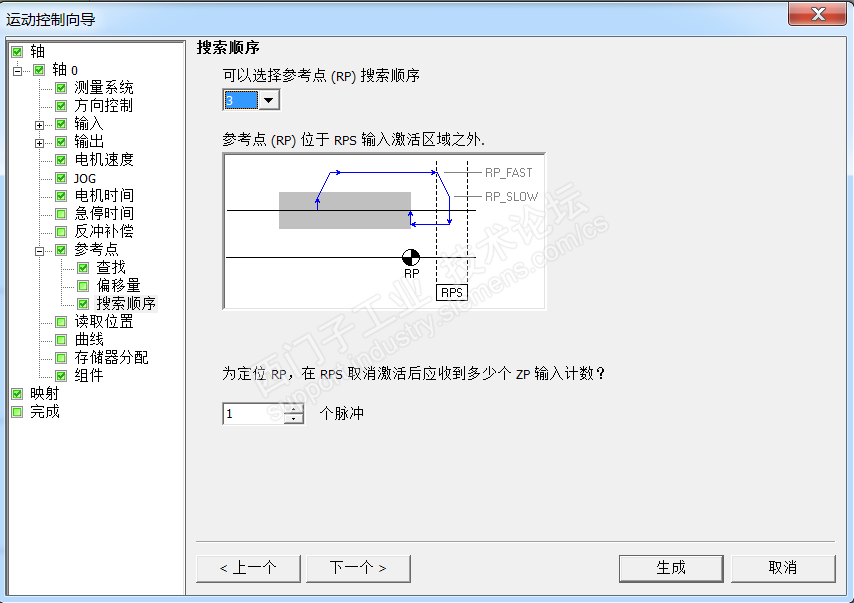
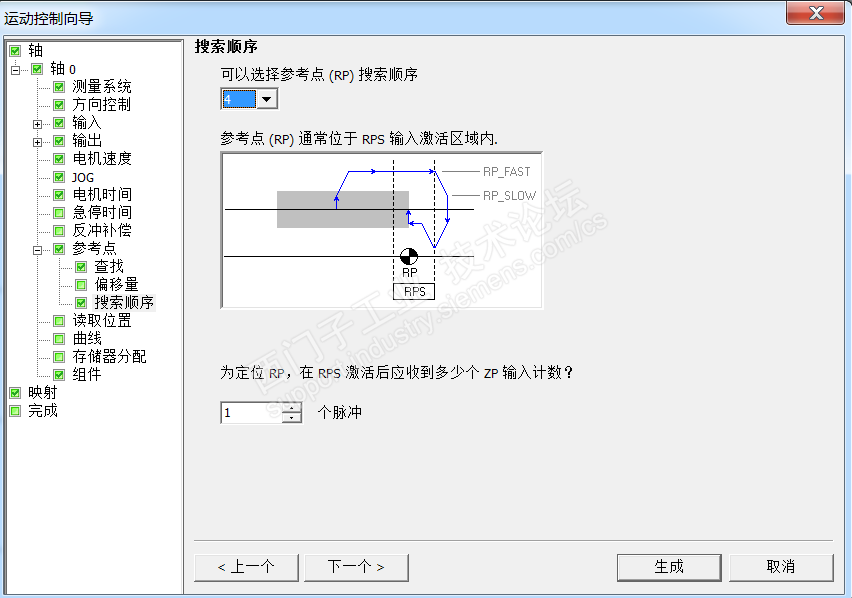
搜索顺序,4种回参考点方式,但是没有和1200那样的碰到硬限位开关自动返回的功能。
方式1,2完全靠回零开关RPS,1脱开回零开关的位置为零点,2压着回零开关的位置为零点。
方式3,4,和1,2类似也是3是脱开回零开关找零点,4在回零开关上找零点。不同的是回零完成是靠零脉冲ZP信号的,同时通过设置ZP个脉冲数也可以达到偏移零点的效果
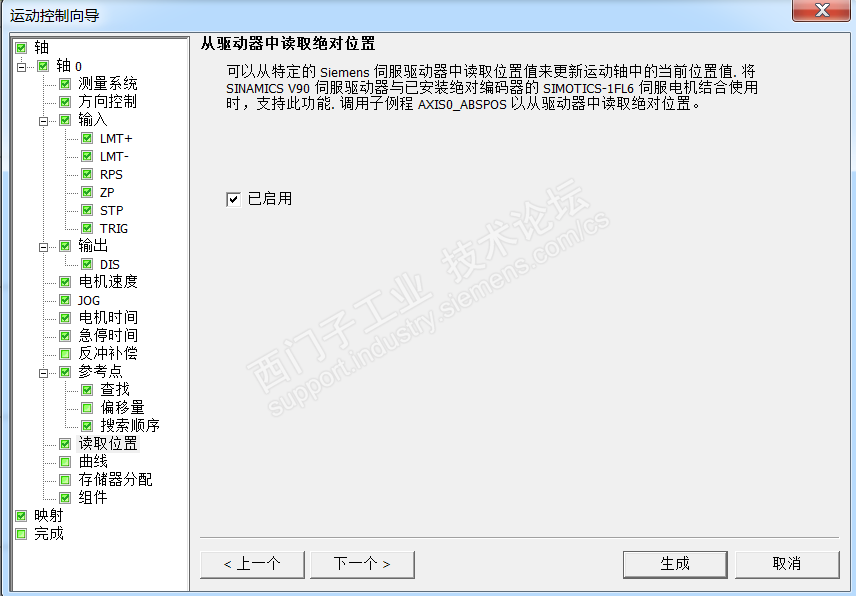
读取位置;通过485口可以读取驱动器的绝对位置。貌似1200没有现成的库
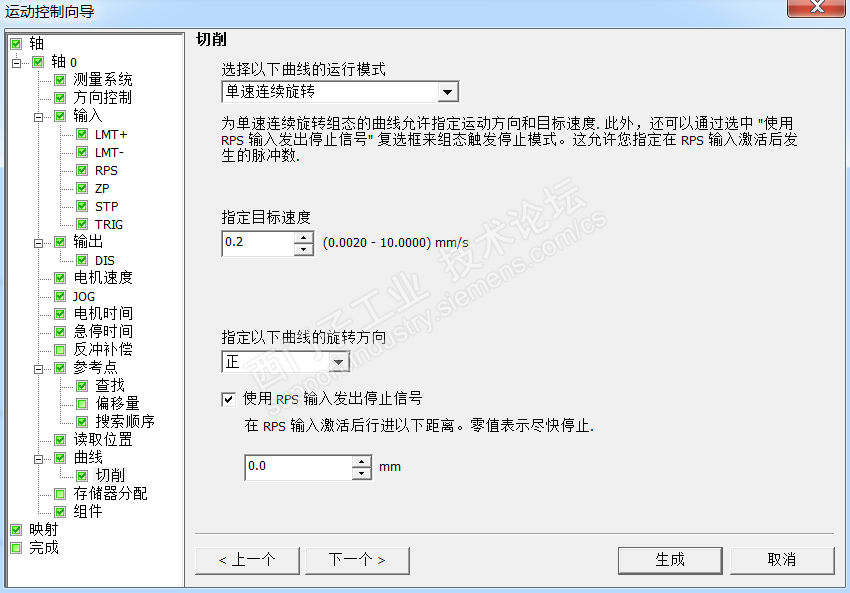
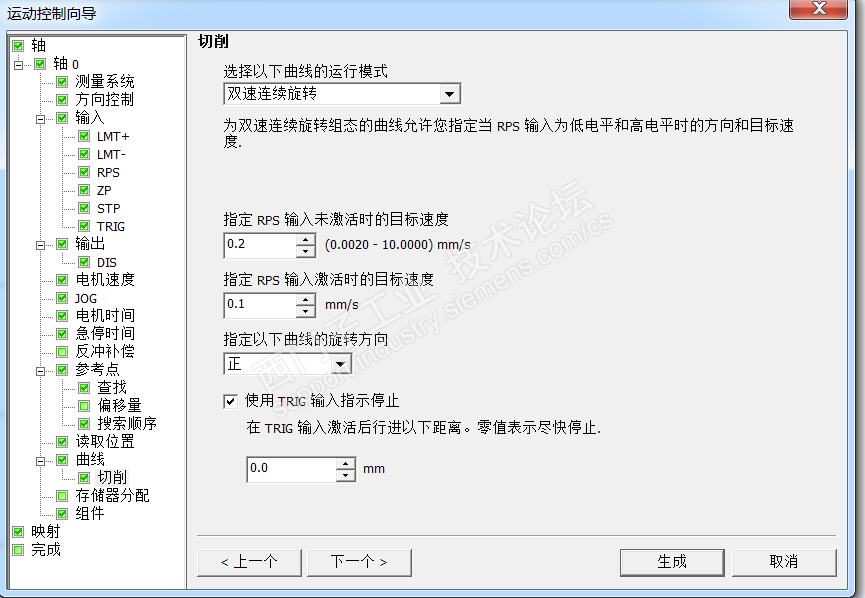
曲线:类似于1200的工艺对象“命令表”(Command table),每个轴可以定义32个曲线,每个曲线可以有16个步,但是一个曲线里面的步的只能是同一种运动模式,要么相对运动要么绝对运动。而不像1200的Command table中的每一步可以设置。

另外还有两种速度模式,分别是单速连续模式和双速连续模式。双速是通过输入点RPS信号点来切换速度的。同时两种模式都能通过输入点信号RPS来停止。快速的停止和速度切换1200直接可以超弛响应,samrt可能只能通过硬件I/O来完成吧

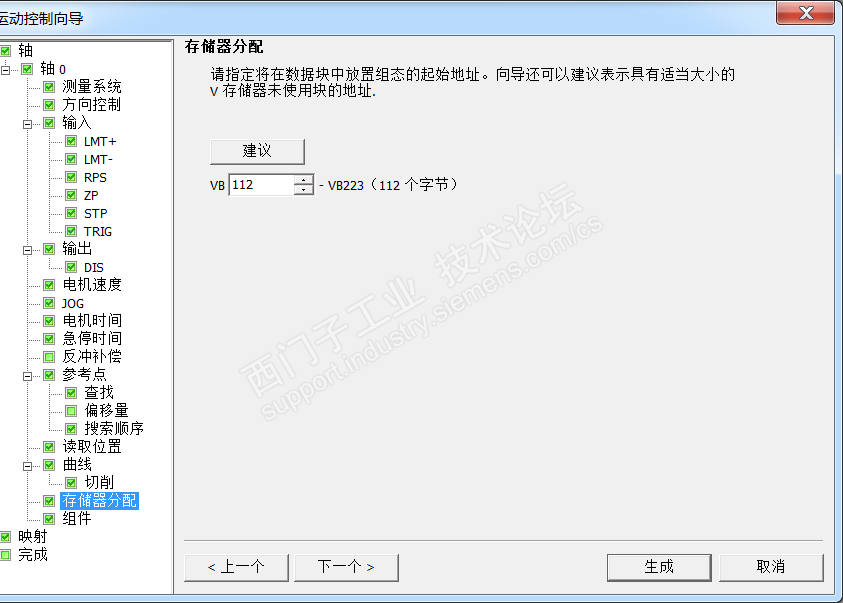
存储器分配:分配组态数据到VB块,选择建议的VB块
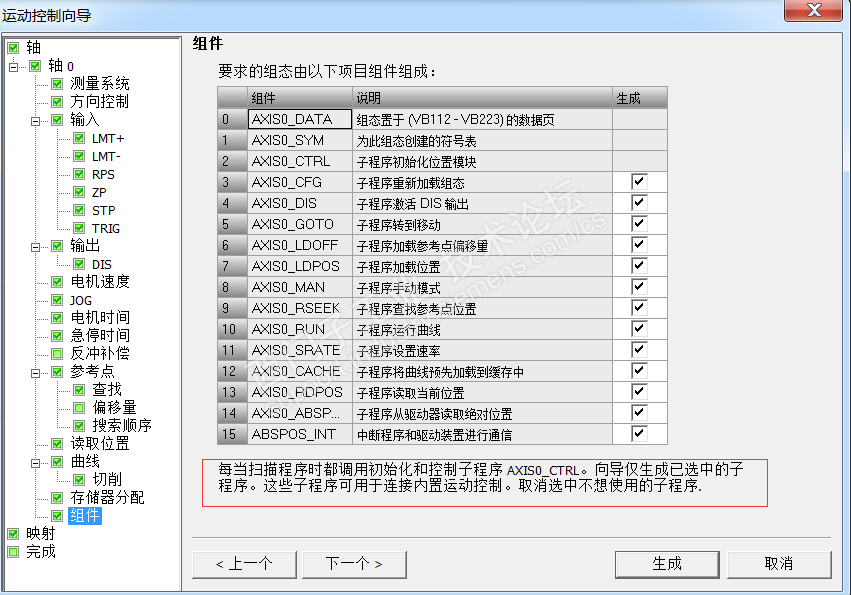
组件;选择需要的功能子程序,一般都是会全选的吧
映射:上面组态过的硬件I/O列表
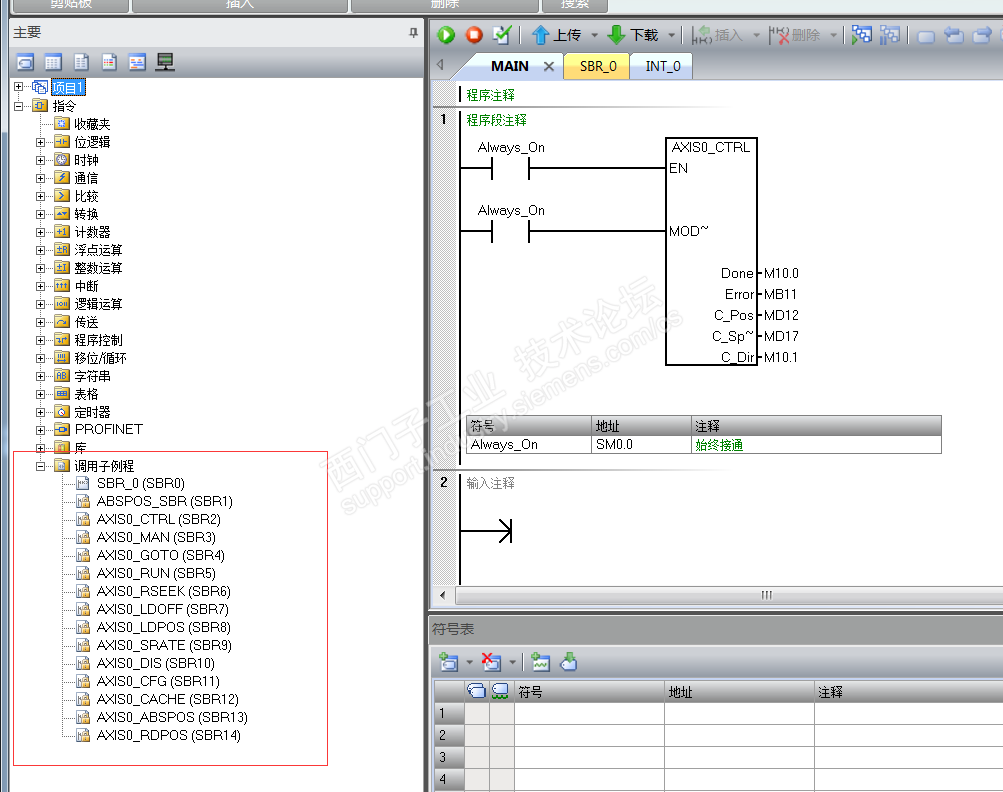
完成:因为Smart不支持FB,所以每个轴的功能都生产了对应轴的子程序。下面就可以开始编程了。
PS;小结在开头










 技术支持
技术支持 AI小西
AI小西
 风驰卡
风驰卡 产品入门
产品入门 在线产品选型
在线产品选型 售后登记和质保查询
售后登记和质保查询

 备件商城
备件商城 ASP工程师验证
ASP工程师验证 ASP公司证书验证
ASP公司证书验证 售后服务常见问题
售后服务常见问题 首页
首页 售前文档(样本、宣传册等)
售前文档(样本、宣传册等)  售后文档(FAQ、手册等)
售后文档(FAQ、手册等)
 首页
首页 立即开通1847会员
立即开通1847会员 首页
首页 教室培训课
教室培训课 取证训练营
取证训练营 在线自学课
在线自学课 认证证书查询
认证证书查询 培训伙伴验证
培训伙伴验证 首页
首页 最新发帖
最新发帖 精华帖
精华帖 发新帖
发新帖 已解决问题
已解决问题 精华常见问题
精华常见问题 运维工程师专区
运维工程师专区 官方商城
官方商城 西门子中国
西门子中国



 普通
普通



 本版热门话题
本版热门话题

 相关推荐
相关推荐 相关帖子推荐
相关帖子推荐










